Key Ideas
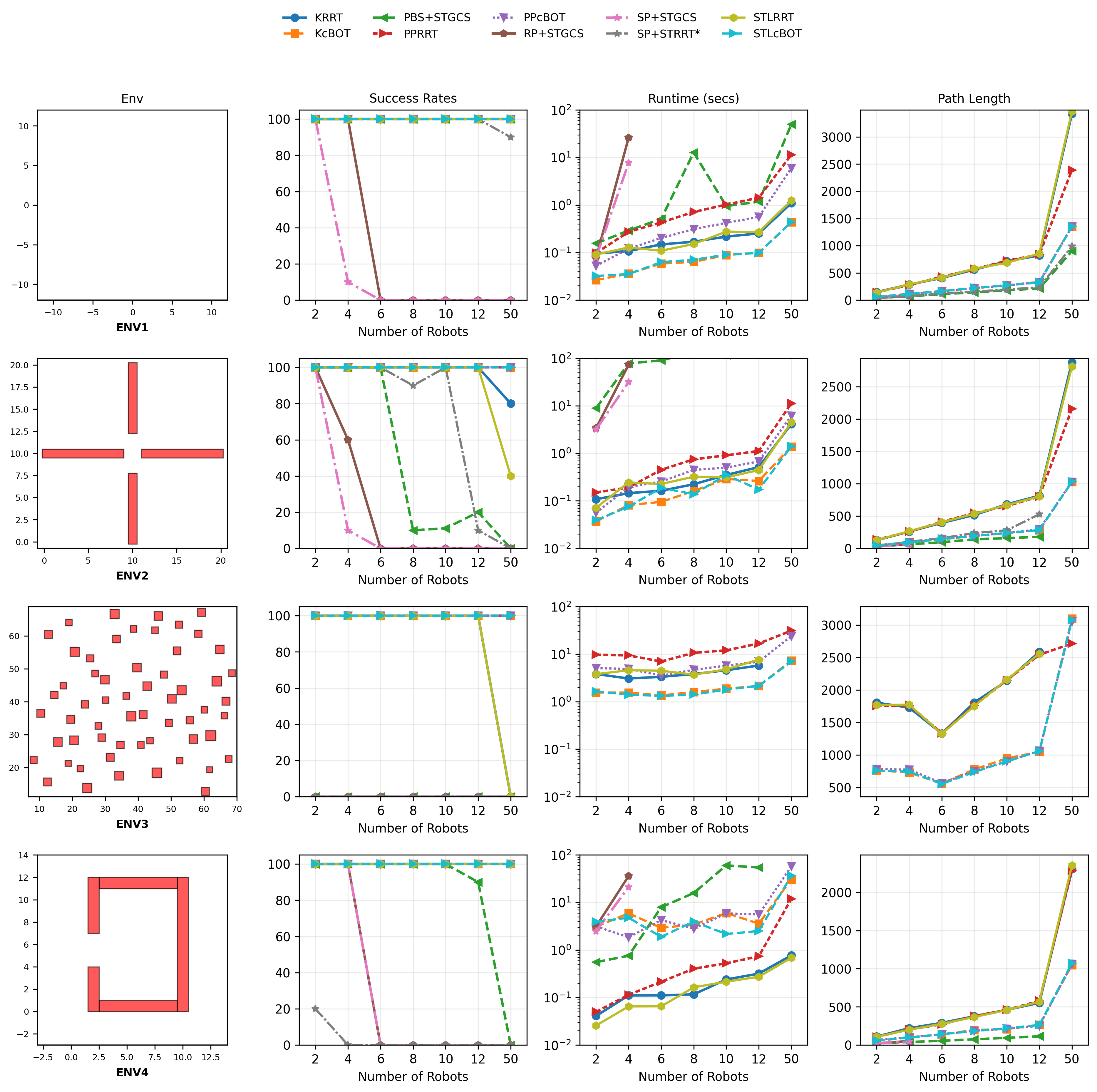
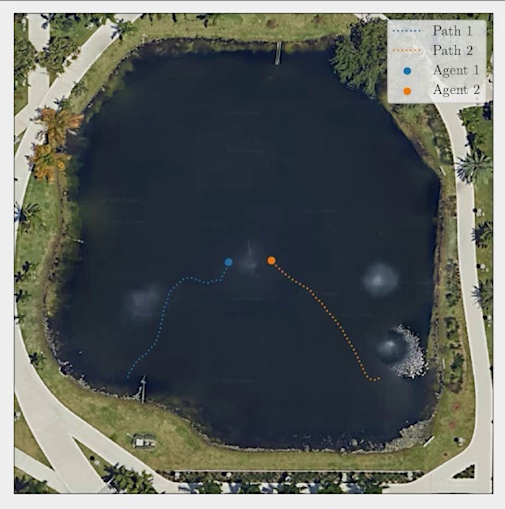
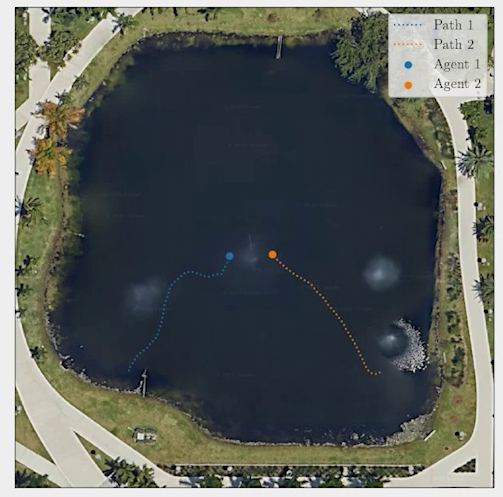
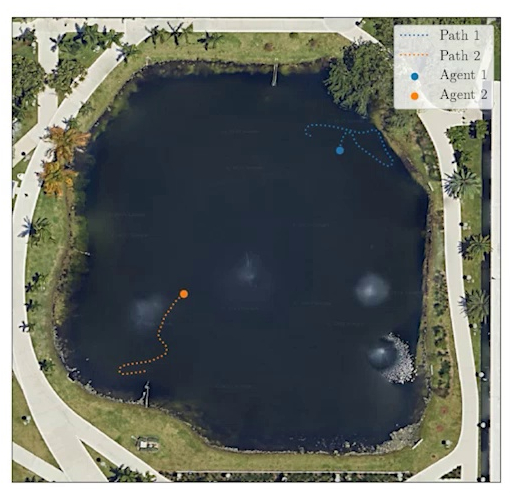
- cBOT: Constrained BO-based tree search that learns a local cost map and feasibility (GP surrogates) to produce shorter, safer trajectories with fewer samples.
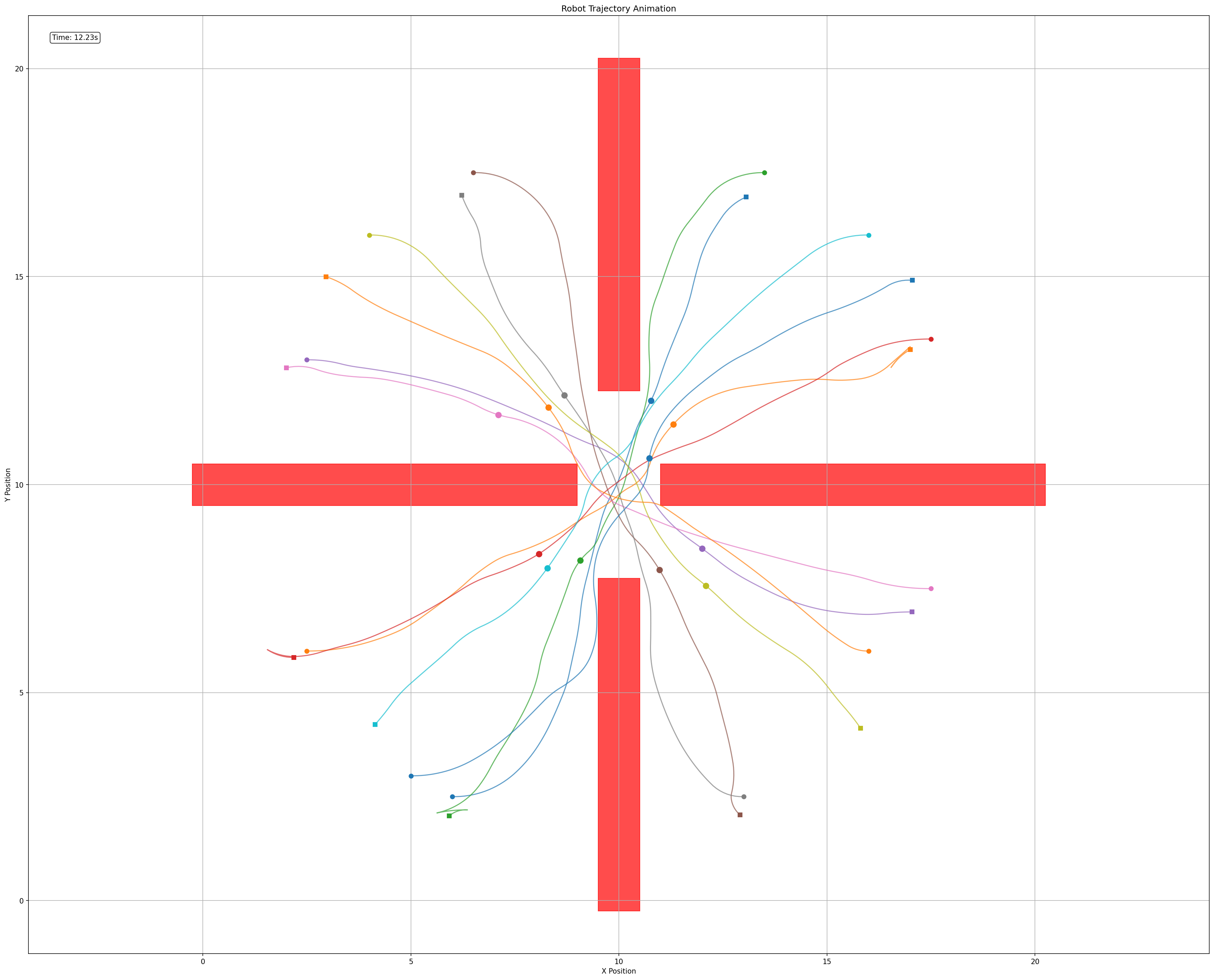
- STL-KCBS: STL-enhanced kinodynamic CBS using robustness-based conflict detection and STL monitors for specification-compliant multi-robot coordination.
- Scalability: Decoupled low-level planning paired with formal STL monitoring for robust satisfaction.